1. 递归神经网络(Recurrent Neural Network, RNN)
递归神经网络(Recurrent Neural Network, RNN)是一类专门用于处理序列数据的神经网络,它通过引入循环连接,使得模型能够记住以前的输入信息,并将其应用于当前时刻的预测。RNN 能够捕捉输入数据的时间依赖性,适合处理时间序列、自然语言处理等涉及序列关系的任务。
1.1. RNN的基本概念
RNN的核心思想是利用隐藏状态来存储和传递序列信息。对于时间序列数据,RNN 在每个时间步都会更新隐藏状态,并根据当前的输入和前一时刻的隐藏状态生成新的隐藏状态。其特点是具有记忆功能,可以处理前后关联的信息。
1. 隐藏状态
隐藏状态 ( h_t ) 是当前时间步存储的信息,包含了从前面时刻传递过来的序列信息。它由当前输入 ( x_t ) 和上一时刻的隐藏状态 ( h_{t-1} ) 共同决定: [ h_t = f(W_h h_{t-1} + W_x x_t + b) ] 其中:
- ( W_h ) 是隐藏状态之间的权重矩阵;
- ( W_x ) 是输入和隐藏状态之间的权重矩阵;
- ( b ) 是偏置向量;
- ( f ) 是一个激活函数(如 tanh 或 ReLU)。
2. 输出
RNN 的输出 ( y_t ) 由当前的隐藏状态决定: [ y_t = g(h_t) ] 其中 ( g ) 是一个激活函数,可以是 softmax 用于分类任务,也可以是线性函数用于回归任务。
1.3 RNN的结构
RNN 可以通过展开的方式理解,如下图所示,在每个时间步,RNN 共享相同的权重,并利用前一个时刻的隐藏状态 ( h_{t-1} ) 和当前输入 ( x_t ) 来计算新的隐藏状态 ( h_t ),然后输出 ( y_t )。

在每个时间步,RNN 使用相同的参数进行计算,这使得模型能够在处理不同长度的序列时保持一致。
1.2。 RNN模拟计算过程
为了更正规地模拟一个 RNN 的计算过程,我们将使用标准的 RNN 公式来进行模拟。RNN 的隐藏状态更新公式为:
[ h_t = f(W_h h_{t-1} + W_x x_t + b) ]
其中:
- ( h_t ) 是第 ( t ) 个时间步的隐藏状态,
- ( W_h ) 是隐藏状态的权重矩阵(维度为 ( n \times n ),其中 ( n ) 是隐藏状态的维度),
- ( W_x ) 是输入到隐藏状态的权重矩阵(维度为 ( n \times m ),其中 ( m ) 是输入的维度),
- ( x_t ) 是第 ( t ) 个时间步的输入向量(维度为 ( m )),
- ( b ) 是偏置向量(维度为 ( n )),
- ( f ) 是非线性激活函数(如 tanh 或 ReLU)。
假设:
- 我们有 3 个时间步 ( t = 1, 2, 3 ),
- 输入向量 ( x_t ) 是 2 维向量,
- 隐藏状态 ( h_t ) 是 2 维向量,
- 激活函数为 tanh 函数。
设定以下参数:
- ( W_h = \begin{pmatrix} 0.5 & 0.1 \ 0.3 & 0.7 \end{pmatrix} )(2x2 矩阵),
- ( W_x = \begin{pmatrix} 0.6 & 0.2 \ 0.4 & 0.8 \end{pmatrix} )(2x2 矩阵),
- 偏置 ( b = \begin{pmatrix} 0.1 \ 0.2 \end{pmatrix} )(2 维向量),
- 输入序列 ( x_1 = \begin{pmatrix} 1 \ 0 \end{pmatrix}, x_2 = \begin{pmatrix} 0 \ 1 \end{pmatrix}, x_3 = \begin{pmatrix} 1 \ 1 \end{pmatrix} ),
- 初始隐藏状态 ( h_0 = \begin{pmatrix} 0 \ 0 \end{pmatrix} )。
激活函数 ( f(x) = \tanh(x) ) 公式为: [ \tanh(x) = \frac{e^x - e^{-x}}{e^x + e^{-x}} ]
计算步骤
时间步 1:
-
计算 ( W_h h_0 + W_x x_1 + b ): [ W_h h_0 = \begin{pmatrix} 0.5 & 0.1 \ 0.3 & 0.7 \end{pmatrix} \begin{pmatrix} 0 \ 0 \end{pmatrix} = \begin{pmatrix} 0 \ 0 \end{pmatrix} ] [ W_x x_1 = \begin{pmatrix} 0.6 & 0.2 \ 0.4 & 0.8 \end{pmatrix} \begin{pmatrix} 1 \ 0 \end{pmatrix} = \begin{pmatrix} 0.6 \ 0.4 \end{pmatrix} ] [ W_h h_0 + W_x x_1 + b = \begin{pmatrix} 0 \ 0 \end{pmatrix} + \begin{pmatrix} 0.6 \ 0.4 \end{pmatrix} + \begin{pmatrix} 0.1 \ 0.2 \end{pmatrix} = \begin{pmatrix} 0.7 \ 0.6 \end{pmatrix} ]
-
应用激活函数 tanh: [ h_1 = \tanh(\begin{pmatrix} 0.7 \ 0.6 \end{pmatrix}) = \begin{pmatrix} \tanh(0.7) \ \tanh(0.6) \end{pmatrix} \approx \begin{pmatrix} 0.604 \ 0.537 \end{pmatrix} ]
时间步 2:
-
计算 ( W_h h_1 + W_x x_2 + b ): [ W_h h_1 = \begin{pmatrix} 0.5 & 0.1 \ 0.3 & 0.7 \end{pmatrix} \begin{pmatrix} 0.604 \ 0.537 \end{pmatrix} = \begin{pmatrix} 0.604 \times 0.5 + 0.537 \times 0.1 \ 0.604 \times 0.3 + 0.537 \times 0.7 \end{pmatrix} = \begin{pmatrix} 0.352 + 0.054 \ 0.181 + 0.376 \end{pmatrix} = \begin{pmatrix} 0.406 \ 0.557 \end{pmatrix} ] [ W_x x_2 = \begin{pmatrix} 0.6 & 0.2 \ 0.4 & 0.8 \end{pmatrix} \begin{pmatrix} 0 \ 1 \end{pmatrix} = \begin{pmatrix} 0.2 \ 0.8 \end{pmatrix} ] [ W_h h_1 + W_x x_2 + b = \begin{pmatrix} 0.406 \ 0.557 \end{pmatrix} + \begin{pmatrix} 0.2 \ 0.8 \end{pmatrix} + \begin{pmatrix} 0.1 \ 0.2 \end{pmatrix} = \begin{pmatrix} 0.706 \ 1.557 \end{pmatrix} ]
-
应用激活函数 tanh: [ h_2 = \tanh(\begin{pmatrix} 0.706 \ 1.557 \end{pmatrix}) = \begin{pmatrix} \tanh(0.706) \ \tanh(1.557) \end{pmatrix} \approx \begin{pmatrix} 0.608 \ 0.914 \end{pmatrix} ]
时间步 3:
-
计算 ( W_h h_2 + W_x x_3 + b ): [ W_h h_2 = \begin{pmatrix} 0.5 & 0.1 \ 0.3 & 0.7 \end{pmatrix} \begin{pmatrix} 0.608 \ 0.914 \end{pmatrix} = \begin{pmatrix} 0.5 \times 0.608 + 0.1 \times 0.914 \ 0.3 \times 0.608 + 0.7 \times 0.914 \end{pmatrix} = \begin{pmatrix} 0.304 + 0.091 \ 0.182 + 0.640 \end{pmatrix} = \begin{pmatrix} 0.395 \ 0.822 \end{pmatrix} ] [ W_x x_3 = \begin{pmatrix} 0.6 & 0.2 \ 0.4 & 0.8 \end{pmatrix} \begin{pmatrix} 1 \ 1 \end{pmatrix} = \begin{pmatrix} 0.6 + 0.2 \ 0.4 + 0.8 \end{pmatrix} = \begin{pmatrix} 0.8 \ 1.2 \end{pmatrix} ] [ W_h h_2 + W_x x_3 + b = \begin{pmatrix} 0.395 \ 0.822 \end{pmatrix} + \begin{pmatrix} 0.8 \ 1.2 \end{pmatrix} + \begin{pmatrix} 0.1 \ 0.2 \end{pmatrix} = \begin{pmatrix} 1.295 \ 2.222 \end{pmatrix} ]
-
应用激活函数 tanh: [ h_3 = \tanh(\begin{pmatrix} 1.295 \ 2.222 \end{pmatrix}) = \begin{pmatrix} \tanh(1.295) \ \tanh(2.222) \end{pmatrix} \approx \begin{pmatrix} 0.860 \ 0.976 \end{pmatrix} ]
最终结果
经过 3 个时间步后,隐藏状态的更新为:
- ( h_1 \approx \begin{pmatrix} 0.604 \ 0.537 \end{pmatrix} )
- ( h_2 \approx \begin{pmatrix} 0.608 \ 0.914 \end{pmatrix} )
- ( h_3
\approx \begin{pmatrix} 0.860 \ 0.976 \end{pmatrix} )
每一步中,输入 ( x_t ) 与前一时间步的隐藏状态 ( h_{t-1} ) 被结合在一起通过权重矩阵和偏置进行更新,最后通过非线性激活函数得到新的隐藏状态。
1.3. RNN的类型
根据输入和输出的结构不同,RNN 可以分为以下几类:
- 多对一(Many-to-One):输入是一个序列,输出是一个单独的值。例如,情感分析任务中,输入是一段文本,输出是该文本的情感分类。
- 一对多(One-to-Many):输入是一个单独的值,输出是一个序列。例如,图像描述生成,输入是一张图片,输出是一段描述该图片的句子。
- 多对多(Many-to-Many):输入和输出都是序列。例如,机器翻译任务中,输入是一段句子,输出是翻译后的句子。
- 同步多对多(Many-to-Many, Same Length):输入和输出序列具有相同的长度,例如,视频帧的标签预测。
1.4. RNN的训练与问题
RNN 的训练和传统神经网络类似,通常使用梯度下降法来更新模型参数。然而,由于 RNN 是处理序列的模型,它的反向传播称为“反向传播通过时间(Backpropagation Through Time, BPTT)”。在 BPTT 中,梯度通过多个时间步进行传播,计算所有时间步上的损失,并对模型进行更新。
1.4.1. 梯度消失和梯度爆炸
RNN 在训练时,由于梯度在时间步上进行反向传播,会面临梯度消失或梯度爆炸的问题。当序列长度较长时,梯度逐渐衰减,模型难以捕捉到远距离的依赖关系;另一方面,梯度爆炸会导致梯度过大,模型不稳定。
为了模拟 梯度消失 和 梯度爆炸 的过程,我们需要通过递归神经网络(RNN)中的反向传播过程来解释。以下将会展示一个通过多个时间步的累积计算,逐步观察梯度是如何在计算过程中逐渐减小(梯度消失)或增大(梯度爆炸)的。
梯度消失和梯度爆炸的简单公式
对于时间步 ( t ) 的隐藏状态 ( h_t ) 来说,其递归更新公式为: [ h_t = f(W_h h_{t-1} + W_x x_t + b) ] 如果我们要计算损失 ( L ) 对 ( W_h ) 的梯度,则需要通过反向传播计算链式导数。损失函数 ( L ) 相对于时间步 ( t ) 的梯度为: [ \frac{\partial L}{\partial W_h} = \frac{\partial L}{\partial h_T} \cdot \frac{\partial h_T}{\partial h_{T-1}} \cdot \frac{\partial h_{T-1}}{\partial h_{T-2}} \cdot \ldots \cdot \frac{\partial h_1}{\partial W_h} ] 其中,每一项 ( \frac{\partial h_t}{\partial h_{t-1}} ) 主要受权重矩阵 ( W_h ) 和激活函数的导数影响。
梯度消失的模拟
假设:
- 我们选择激活函数 ( f ) 为 sigmoid 函数(或 tanh 函数),这些激活函数的导数通常在 ( 0 \leq f’(x) \leq 1 ) 之间。
- 使用的权重矩阵 ( W_h ) 的数值较小,例如 ( W_h = 0.5 )。
我们来看一个简单的例子,使用递归公式来模拟梯度的衰减。
梯度消失模拟
假设:
- 时间步 ( t = 1, 2, \ldots, T )
- 激活函数的导数为 ( f’(x) = 0.5 )(比如 tanh 或 sigmoid 函数在某些输入范围内的典型值)
- 权重矩阵 ( W_h = 0.5 )
反向传播的计算过程: 每个时间步的梯度可以近似为: [ \frac{\partial h_t}{\partial h_{t-1}} = f’(W_h h_{t-1}) \cdot W_h ] 由于 ( f’(x) = 0.5 ) 且 ( W_h = 0.5 ),我们可以得出每个时间步的梯度为: [ \frac{\partial h_t}{\partial h_{t-1}} = 0.5 \cdot 0.5 = 0.25 ]
那么,随着时间步 ( t ) 增加,最终的梯度是多个时间步梯度的连乘: [ \frac{\partial L}{\partial W_h} = 0.25^{T} ] 当 ( T ) 较大时,梯度呈指数性衰减。例如:
- ( T = 5 ) 时,梯度为 ( 0.25^5 = 0.000976 )
- ( T = 10 ) 时,梯度为 ( 0.25^{10} = 0.000000953 )
结论:随着时间步的增加,梯度迅速接近于 0,模型难以学习到远距离的依赖关系,这就是梯度消失现象。
梯度消失的结果:
- 在较长的序列中,模型逐步“忘记”了早期时间步的信息,因为梯度逐步衰减为接近 0 的值。
梯度爆炸的模拟
我们现在来看看梯度爆炸的情况。
假设:
- 激活函数仍然为 sigmoid 或 tanh 函数,但这次我们设定权重矩阵 ( W_h ) 的数值较大,例如 ( W_h = 2 )。
- 激活函数的导数 ( f’(x) ) 仍然为 ( 0.5 )。
梯度爆炸模拟
每个时间步的梯度近似为: [ \frac{\partial h_t}{\partial h_{t-1}} = f’(W_h h_{t-1}) \cdot W_h ] 由于 ( W_h = 2 ) 和 ( f’(x) = 0.5 ),每个时间步的梯度为: [ \frac{\partial h_t}{\partial h_{t-1}} = 0.5 \cdot 2 = 1 ] 这时候,每一层的梯度将不会变小,而是保持 1。
如果我们进一步增加 ( W_h ),例如 ( W_h = 3 ),则每一层的梯度为: [ \frac{\partial h_t}{\partial h_{t-1}} = 0.5 \cdot 3 = 1.5 ]
随着时间步增加,最终梯度是多个时间步梯度的连乘: [ \frac{\partial L}{\partial W_h} = 1.5^{T} ] 当 ( T ) 较大时,梯度呈指数性增长。例如:
- ( T = 5 ) 时,梯度为 ( 1.5^5 = 7.59 )
- ( T = 10 ) 时,梯度为 ( 1.5^{10} = 57.67 )
结论:随着时间步的增加,梯度迅速增大,甚至可能达到无法控制的程度。这就是梯度爆炸现象。
梯度爆炸的结果:
- 梯度在每一时间步上都迅速放大,导致参数更新的幅度过大,模型训练变得不稳定,甚至可能无法收敛。
总结
- 梯度消失:当权重较小且激活函数导数趋近于 0 时,梯度会呈指数衰减,随着时间步的增加,梯度趋近于 0,导致模型难以捕捉长时间步的依赖关系。
- 梯度爆炸:当权重较大时,梯度会呈指数增长,导致训练过程中梯度过大,模型难以收敛,甚至数值会溢出。
这两个问题在标准 RNN 中非常常见,尤其是在处理长序列时。因此,引入了 LSTM 和 GRU 等改进模型来解决这些问题。
1.4.2. 短期依赖问题
短期依赖问题是递归神经网络(RNN)在处理长序列数据时的一种局限性,具体表现为 RNN 更擅长处理序列中相对较近的时间步之间的依赖关系,而在捕捉远距离的、较长时间步之间的依赖关系时会遇到困难。这种现象与梯度消失问题紧密相关。
RNN 是通过在时间步之间共享隐藏状态来捕捉序列数据的时间依赖性。随着时间步的增加,早期输入的信息通过隐藏状态逐步传递给后续时间步。然而,当序列长度较长时,早期时间步的信息很容易在隐藏状态的多次更新过程中被“稀释”或“遗忘”,最终难以对后续时间步的输出产生有效影响。这就导致了 RNN 更容易依赖短期的信息,忽视远距离的依赖。
1.5. 改进的 RNN 结构
1. LSTM(Long Short-Term Memory)
LSTM 是一种专门设计用于解决 RNN 梯度消失问题的改进版本。LSTM 引入了“遗忘门”、“输入门”和“输出门”来控制信息的流动,从而能够有效地记住较长的序列信息。
- 遗忘门:决定哪些信息应该被遗忘。
- 输入门:决定哪些信息应该被写入当前状态。
- 输出门:决定从当前状态输出哪些信息。
LSTM 通过这些门控机制,能够更好地捕捉长期依赖关系。
2. GRU(Gated Recurrent Unit)
GRU 是 LSTM 的简化版本,它将 LSTM 的遗忘门和输入门合并成了一个“更新门”,并保留了类似的门控机制。GRU 相比 LSTM 计算更为高效,性能也相当。
1.6. 应用场景
RNN 及其变种在处理序列数据的任务中表现优异,常见的应用场景包括:
- 自然语言处理(NLP):如文本分类、机器翻译、语言模型等。
- 语音识别:RNN 能够处理语音信号中的时序依赖关系,应用于语音识别和生成。
- 时间序列预测:如股票预测、天气预报等。
- 视频分析:RNN 可以处理视频中的序列帧信息,用于动作识别或场景理解。
2. LSTM(Long Short-Term Memory)
LSTM(Long Short-Term Memory)是一种特殊的递归神经网络(RNN),专门用于处理序列数据,尤其是具有长时间依赖性的任务。LSTM 是为了克服传统 RNN 中梯度消失和梯度爆炸问题而设计的,特别适用于长序列数据的建模。
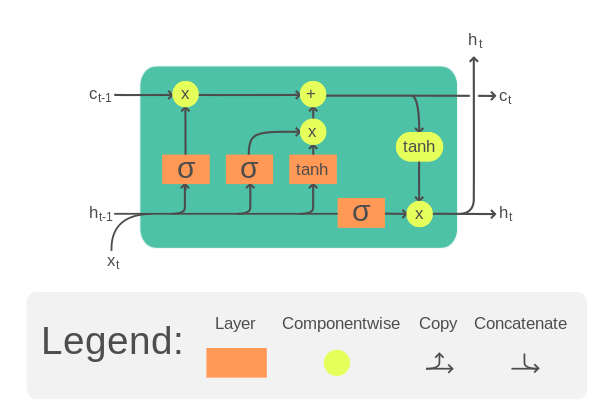
2.1. LSTM的结构:
LSTM 通过引入“记忆细胞”(memory cell)和一组“门”(gates)来实现更好的长期依赖处理。每个 LSTM 单元(cell)包含三个门,它们用于控制信息的流动:
- 遗忘门(Forget Gate):决定哪些信息需要从记忆单元中遗忘或丢弃。
- 输入门(Input Gate):决定哪些新的信息会被存入记忆单元中。
- 输出门(Output Gate):决定当前时刻的隐藏状态会输出什么信息。
LSTM 通过这些门结构,能够选择性地保留或丢弃信息,从而有效地捕捉长期依赖关系,而不像传统 RNN 那样在长时间序列数据中容易发生梯度消失或爆炸。
2.2. LSTM的公式:
在每个时间步 ( t ),LSTM 的状态更新公式如下:
-
遗忘门: [ f_t = \sigma(W_f \cdot [h_{t-1}, x_t] + b_f) ] ( f_t ) 控制记忆单元中哪些信息被遗忘,( W_f ) 和 ( b_f ) 是权重矩阵和偏置项,( h_{t-1} ) 是上一个时间步的隐藏状态,( x_t ) 是当前输入。
-
输入门: [ i_t = \sigma(W_i \cdot [h_{t-1}, x_t] + b_i) ] ( i_t ) 控制哪些信息被加入到记忆单元中。
-
候选记忆单元: [ \tilde{C}t = \tanh(W_C \cdot [h{t-1}, x_t] + b_C) ] 这是候选的新信息,准备被加入到记忆单元。
-
更新记忆单元: [ C_t = f_t * C_{t-1} + i_t * \tilde{C}_t ] 记忆单元 ( C_t ) 是基于遗忘门和输入门的组合,整合了历史信息和新输入。
-
输出门: [ o_t = \sigma(W_o \cdot [h_{t-1}, x_t] + b_o) ] ( o_t ) 决定当前时间步的隐藏状态 ( h_t )。
-
隐藏状态更新: [ h_t = o_t * \tanh(C_t) ] 隐藏状态 ( h_t ) 是当前时刻要输出的结果。
2.3.LSTM的应用:
LSTM 常用于以下任务:
- 自然语言处理(NLP):如机器翻译、情感分析等。
- 时间序列预测:如股票价格预测、气象预测等。
- 语音识别:处理语音信号中的时间序列数据。
- 视频处理:从视频帧中提取连续的时间信息。
2.4. 简单的例子计算
LSTM 在捕捉长时间序列中的依赖关系方面非常有效,常用于各种需要建模序列数据的领域。我们可以通过一个简单的例子来展示 LSTM 的计算过程。假设我们有以下输入序列 ( x = [x_1, x_2, x_3] ),并且我们将 LSTM 的各个参数简化为标量操作。
1. 初始化:
我们首先初始化以下状态:
- 隐藏状态 ( h_0 = 0 )
- 记忆单元 ( C_0 = 0 )
假设每个门的权重和偏置都是固定的值(为了简单说明):
- 遗忘门权重 ( W_f = 0.5 ),偏置 ( b_f = 0 )
- 输入门权重 ( W_i = 0.5 ),偏置 ( b_i = 0 )
- 候选记忆单元权重 ( W_C = 0.5 ),偏置 ( b_C = 0 )
- 输出门权重 ( W_o = 0.5 ),偏置 ( b_o = 0 )
每个门使用的是 sigmoid 函数 ( \sigma(x) = \frac{1}{1 + e^{-x}} ),而候选记忆单元使用的是 ( \tanh ) 函数。
2. 第一步计算( ( t = 1 ) 时):
输入: ( x_1 = 1 )
遗忘门:
[ f_1 = \sigma(W_f \cdot h_0 + b_f) = \sigma(0.5 \cdot 0 + 0) = 0.5 ]
输入门:
[ i_1 = \sigma(W_i \cdot h_0 + b_i) = \sigma(0.5 \cdot 0 + 0) = 0.5 ]
候选记忆单元:
[ \tilde{C}_1 = \tanh(W_C \cdot h_0 + b_C) = \tanh(0.5 \cdot 0 + 0) = 0 ]
更新记忆单元:
[ C_1 = f_1 \cdot C_0 + i_1 \cdot \tilde{C}_1 = 0.5 \cdot 0 + 0.5 \cdot 0 = 0 ]
输出门:
[ o_1 = \sigma(W_o \cdot h_0 + b_o) = \sigma(0.5 \cdot 0 + 0) = 0.5 ]
隐藏状态更新:
[ h_1 = o_1 \cdot \tanh(C_1) = 0.5 \cdot \tanh(0) = 0 ]
3. 第二步计算( ( t = 2 ) 时):
输入: ( x_2 = 2 )
遗忘门:
[ f_2 = \sigma(W_f \cdot h_1 + b_f) = \sigma(0.5 \cdot 0 + 0) = 0.5 ]
输入门:
[ i_2 = \sigma(W_i \cdot h_1 + b_i) = \sigma(0.5 \cdot 0 + 0) = 0.5 ]
候选记忆单元:
[ \tilde{C}_2 = \tanh(W_C \cdot h_1 + b_C) = \tanh(0.5 \cdot 0 + 0) = 0 ]
更新记忆单元:
[ C_2 = f_2 \cdot C_1 + i_2 \cdot \tilde{C}_2 = 0.5 \cdot 0 + 0.5 \cdot 0 = 0 ]
输出门:
[ o_2 = \sigma(W_o \cdot h_1 + b_o) = \sigma(0.5 \cdot 0 + 0) = 0.5 ]
隐藏状态更新:
[ h_2 = o_2 \cdot \tanh(C_2) = 0.5 \cdot \tanh(0) = 0 ]
4. 第三步计算( ( t = 3 ) 时):
输入: ( x_3 = 3 )
遗忘门:
[ f_3 = \sigma(W_f \cdot h_2 + b_f) = \sigma(0.5 \cdot 0 + 0) = 0.5 ]
输入门:
[ i_3 = \sigma(W_i \cdot h_2 + b_i) = \sigma(0.5 \cdot 0 + 0) = 0.5 ]
候选记忆单元:
[ \tilde{C}_3 = \tanh(W_C \cdot h_2 + b_C) = \tanh(0.5 \cdot 0 + 0) = 0 ]
更新记忆单元:
[ C_3 = f_3 \cdot C_2 + i_3 \cdot \tilde{C}_3 = 0.5 \cdot 0 + 0.5 \cdot 0 = 0 ]
输出门:
[ o_3 = \sigma(W_o \cdot h_2 + b_o) = \sigma(0.5 \cdot 0 + 0) = 0.5 ]
隐藏状态更新:
[ h_3 = o_3 \cdot \tanh(C_3) = 0.5 \cdot \tanh(0) = 0 ]
总结:
经过三步的计算,隐藏状态 ( h_1, h_2, h_3 ) 都是 0。这个简单的例子
3. GRU(Gated Recurrent Unit,门控循环单元)
是RNN的一种变体,类似于LSTM,但相比之下结构更简单。GRU 模型主要用于解决传统 RNN 中长时间依赖时的梯度消失问题。相比 LSTM,GRU 去掉了 LSTM 中的记忆单元(Cell State)和输出门,而是通过两个门(更新门和重置门)来控制信息流动,因而计算更为高效。
GRU的结构:
GRU 的核心在于两个门控机制:更新门(Update Gate) 和 重置门(Reset Gate)。这两个门分别决定是否将之前的信息保留,或者重置。
- 更新门(Update Gate):控制当前时间步的信息与先前时间步的信息之间的融合程度,类似于 LSTM 的输入门和遗忘门的结合体。
- 重置门(Reset Gate):控制遗忘机制,即决定丢弃多少过去的记忆,用以生成候选的隐藏状态。
GRU的公式:
与 LSTM 类似,GRU 的计算也分为几个步骤:
-
更新门: [ z_t = \sigma(W_z \cdot [h_{t-1}, x_t]) ] 其中,( z_t ) 是更新门的输出,( W_z ) 是权重矩阵,( h_{t-1} ) 是上一时刻的隐藏状态,( x_t ) 是当前的输入,( \sigma ) 是 sigmoid 函数。
-
重置门: [ r_t = \sigma(W_r \cdot [h_{t-1}, x_t]) ] ( r_t ) 是重置门的输出,控制是否要忘记之前的隐藏状态。
-
候选隐藏状态: [ \tilde{h}t = \tanh(W_h \cdot [r_t * h{t-1}, x_t]) ] 其中,( \tilde{h}_t ) 是当前的候选隐藏状态,( r_t ) 决定了是否重置先前的隐藏状态,( \tanh ) 函数用于生成新的候选隐藏状态。
-
隐藏状态更新: [ h_t = z_t * h_{t-1} + (1 - z_t) * \tilde{h}t ] 最终的隐藏状态 ( h_t ) 是更新门 ( z_t ) 结合了上一时刻的隐藏状态 ( h{t-1} ) 和当前的候选状态 ( \tilde{h}_t ) 所产生的。
GRU与LSTM的比较:
- 结构简单:GRU 有两个门,而 LSTM 有三个门和一个额外的记忆单元,因此 GRU 计算更简单,训练速度更快。
- 性能相似:在很多任务中,GRU 和 LSTM 的性能接近,但由于 GRU 更简单,在某些任务上可能会表现得更好,特别是在计算资源有限的情况下。
- 长时间依赖:两者都擅长处理长时间依赖的问题,但由于 LSTM 具有独立的记忆单元,它可能在处理某些复杂的时间序列任务时更具优势。
GRU的应用:
与 LSTM 类似,GRU 也被广泛应用于序列数据建模的任务中,包括:
- 自然语言处理(NLP)中的文本生成、机器翻译、语音识别。
- 时间序列预测,如金融市场数据分析。
- 视频处理中的帧间关系建模。
GRU 的优点在于它比 LSTM 更加简洁、速度更快,但仍能够保留很好的性能表现。